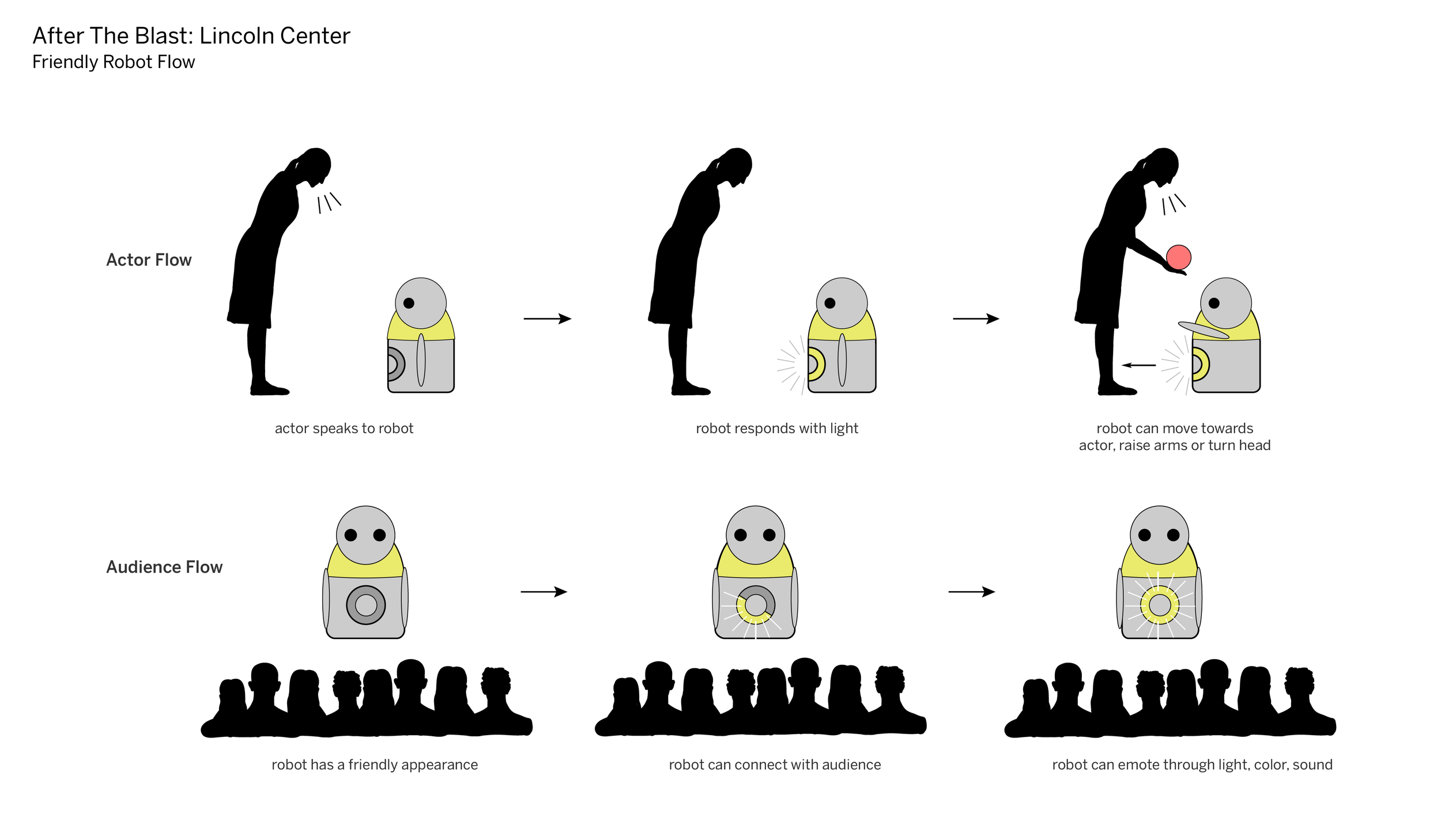
I was the Experience Designer and Creative Technologist on this project. I designed the robot’s on stage interaction and built and coded the physical computing components.
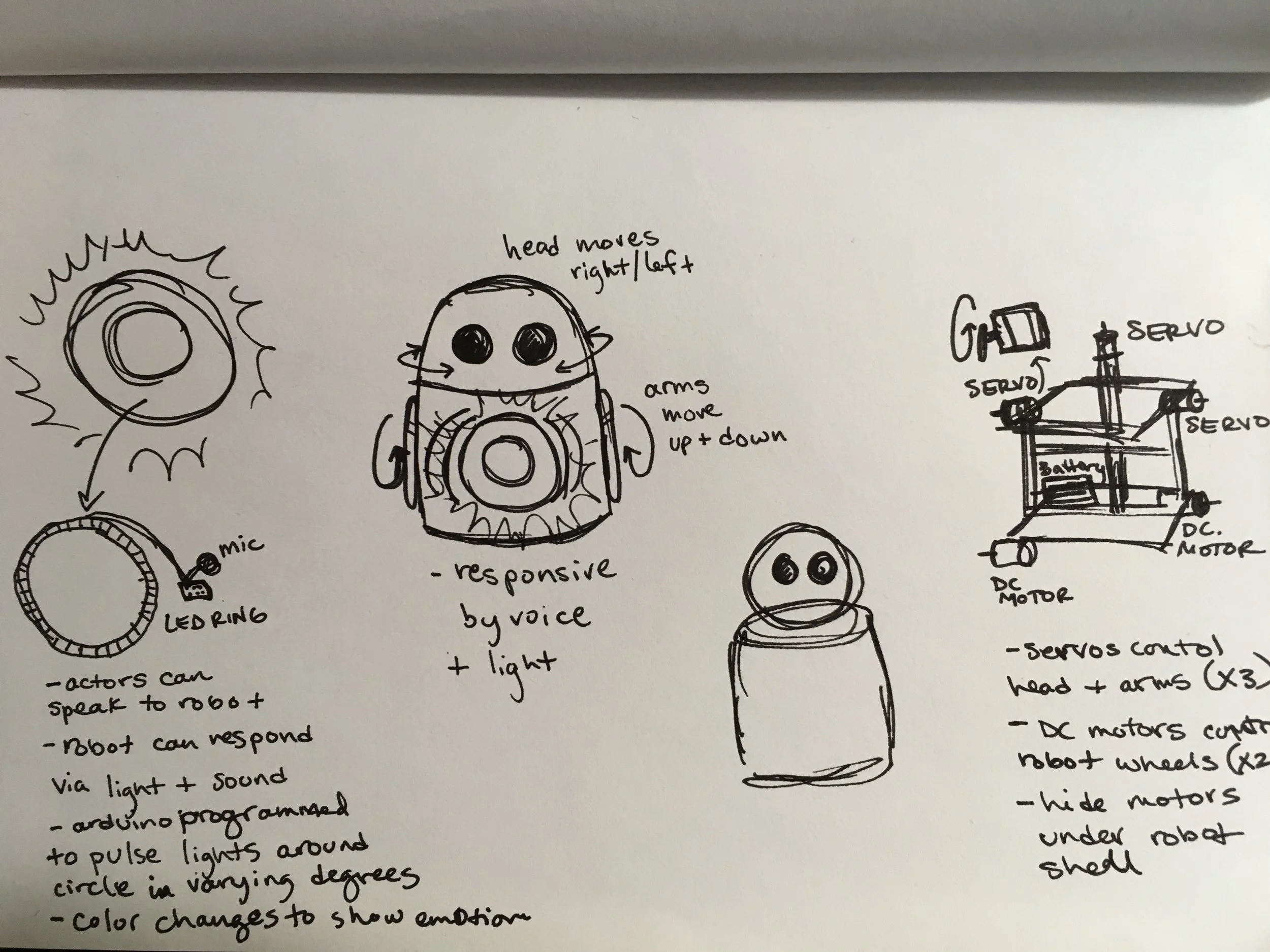
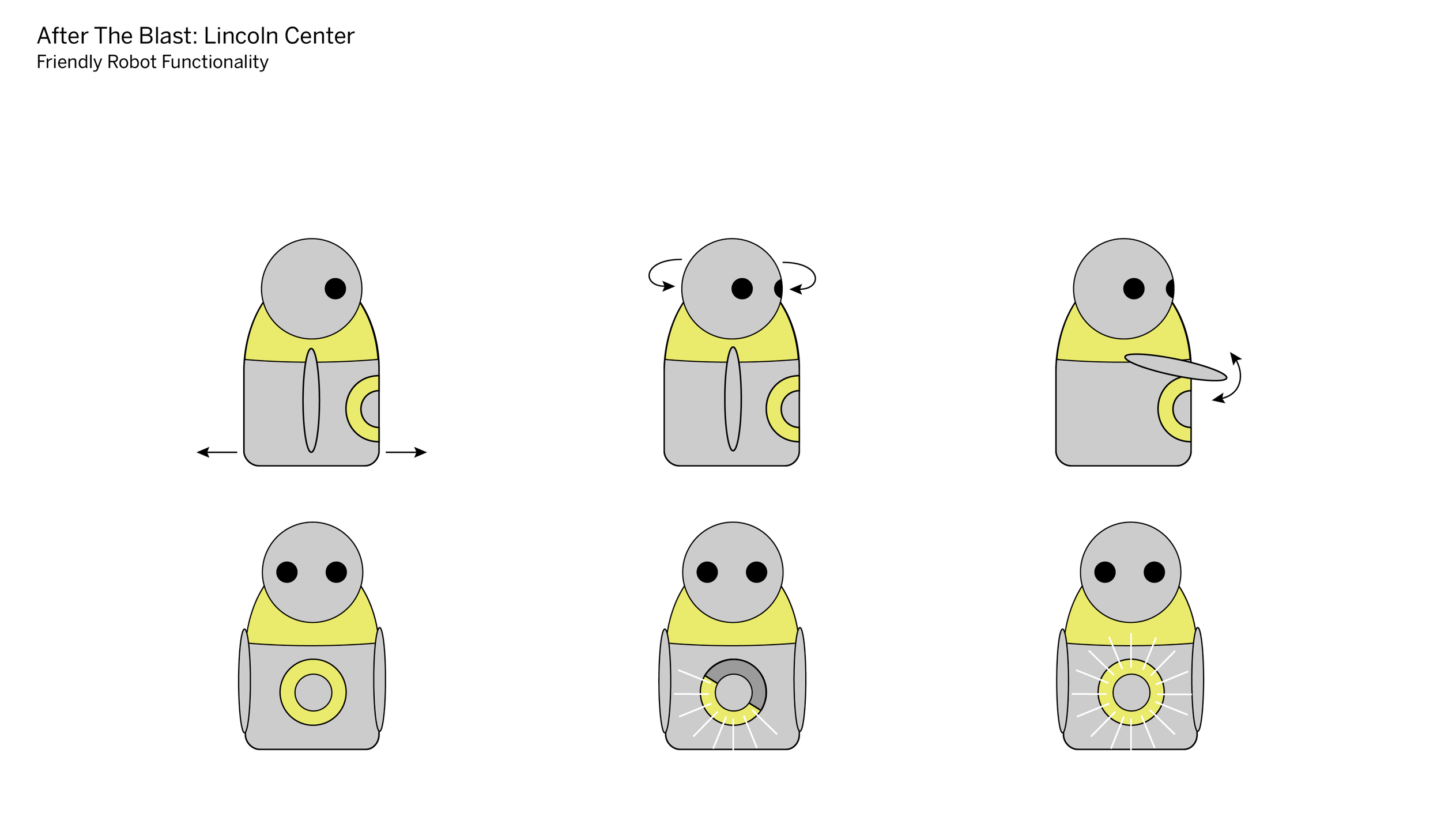
The robot can move forward, reverse, lift each arm individually, and turn left and right 360 degrees. By having the core movements of the robot controlled by a technical staff member offstage, this cut time, cost, and potential technical reliability that would have resulted from focusing on coding these interactions into the robot.